- AEC
- 1.6T
- 800G
- ACC
- 800G
- 400G
- DAC
- DAC-QSFP-DD (800G)
- DAC-OSFP (800G)
- Loopback
- 1.6T(Active)
- 800G(Passive)
- Adaptor
- 400G to 100G
- 100G to 25G
- Busbar Series
- Busbar Clip Cable
- Busbar Clip Connector
- Inner Busbar
- Rack Busbar
- Power Cable
- ORV3 AC Whip Cable
- Wire Harness Cable
- GPU Power Cable
- Fiber optics
- patchcard
- Patch cords & Pigtails
- RJ
- RJ Cable
- RJ Connector
- Flexible Flat Cable & Flat Cable
- Flat Cable
- Flat Rainbow Cable
- Flexible Flat Cable
- AEC
- 1.6T
- 800G
- ACC
- 800G
- 400G
- DAC
- DAC-QSFP-DD (800G)
- DAC-OSFP (800G)
- Loopback
- 1.6T (Active)
- 800G (Passive)
- Adaptor
- 400G to 100G
- 100G to 25G
- Busbar Series
- Busbar Clip Cable
- Busbar Clip Connector
- Inner Busbar
- Rack Busbar
- Power Cable
- ORV3 AC Whip Cable
- Wire Harness Cable
- GPU Power Cable
- Fiber optics
- patchcard
- Patch cords & Pigtails
- RJ
- RJ Cable
- RJ Connector
- Flexible Flat Cable & Flat Cable
- Flat Cable
- Flat Rainbow Cable
- Flexible Flat Cable

多軸控制器RCX340
Specifications
01具有高度功能性,可實現高級設備的構建
通過高速通信,可以實現多台機器人的同步驅動。
通過控制器之間的鏈接,編程只需記入一台控制器即可。
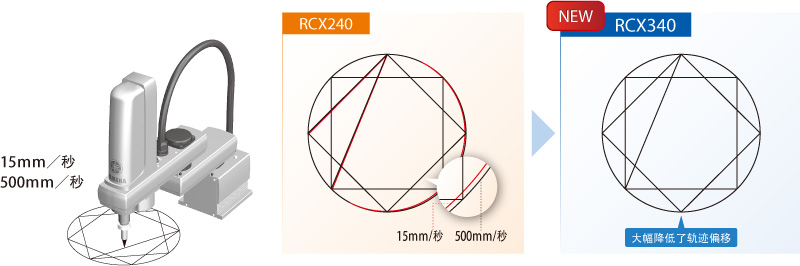
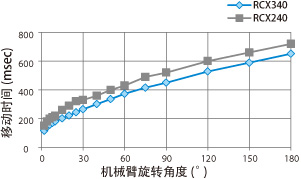
使用新開發的算法,成功縮短了定位時間並提升了軌跡精度。
通過一台主控制器可管理多台機器人的控制
RCX340 控制器實現了控制器之間的高速通信。由於可以從主控制器向各從屬控制器發出動作命令,程序、點位只需使用上級主控制器管理即可。此外,由於還可以靈活應對多任務,因此可以簡化使用PLC 的操作。各機器人可以同時啟動、同時到達,自由控制。可以簡約地構建低成本、使用多個軸的複雜且精密的機器人系統。

通過大幅改善運動功能,實現了平滑動作
通過配備新伺服運動引擎,可以進行各種動作的連接。使用新開發的算法,成功縮短了定位時間並提升了軌跡精度。
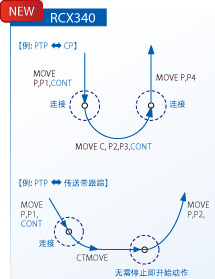
CONT 選配的功能擴展
通過PTP 與插補動作、傳送帶跟踪等不同類動作的連接,實現高速化。
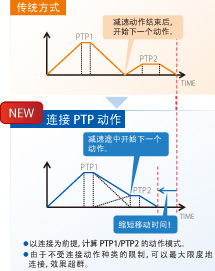
提高動作速度
使用連接PTP,可以在允許的限度內連接所有動作。由於可以有效地連接加減速時間不同的動作,優先其動作時間,因此可以大幅縮短移動時間。
根據用途區分使用
進行連續動作時,塗膠等具有一定速度的動作使用傳統PATH,而優先移動時間時,則通過連接PTP,可以選擇適合用途的動作。
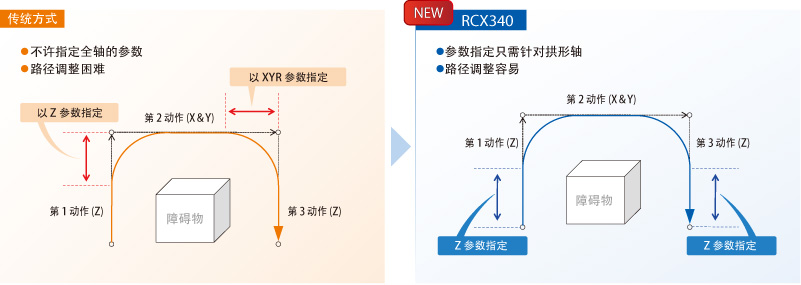
可以較為直觀地指定拱形運動
通過變更拱形運動的路徑指定方法,除了可以簡化指定方法外,還可以更直觀地指定動作。
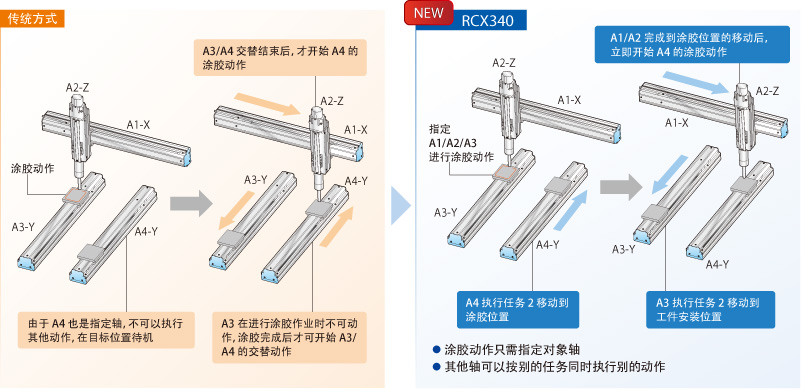
通過自由的軸組成,可支持各種應用
例: 雙軌的插補動作
通過多坐標軸設定和CP 命令的軸指定,從而實現了雙軌之間的插補動作。可大幅縮短具有多個同坐標屬性軸的機器人的周期時間。
例: 4 軸點膠機器人A1-X/A2-Z/A3-Y/A4-Y
提升軌跡精度
通過伺服分析功能的可視化和新伺服功能帶來的高響應性,提高了跟踪性能,與以往機型相比提升了軌跡精度。
02經過改善的基本性能
機器人語言、多任務、邏輯控制功能、通信、現場總線等功能較為簡便易用。
運動的優化
由於充分發揮了機器人的性能,進一步增強了與動作模式配合的運動的優化。
通過縮短動作時間和抑制停止時的震動等改善,實現了高品質的機器人動作。
合適的加減速運動
實現可以抑制震動並執行高速動作的加減速運動。
小巧設計
外部尺寸為355mm(W) × 195mm(H) × 130mm(D)。與以往的4 軸控制器相比體積約為85%, 實現了小型化, 易於設置在控制盤內。

縮短週期時間
YK-XG 系列實現了高速化。
例: YK400XG
標準週期時間動作0.49sec → 0.45sec
增加用戶內存容量
點數大幅增加
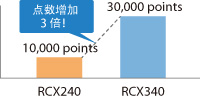
程序和點位的合計容量

提升了識別性和操作性的支持工具——新支持軟件"RCX-Studio"
增強了程序調試功能,可應對多任務。憑藉簡便易用的操作性和程序輸入支持功能,可以實現快速安裝。
雅馬哈機器人易使用,安裝快捷/ 可高效維護
易用的操作系統
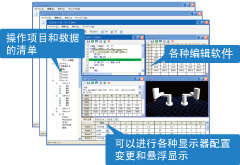
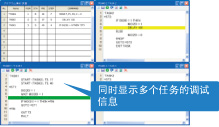
增強化了程序調試功能, 可應對多任務
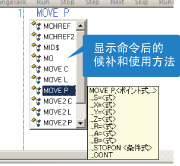
程序輸入支持功能
新手持編程器PBX
支持日語、英語和中文3 國語言。使用彩色顯示器提高了識別性。
追加功能、修改作業簡單化,缺乏編程知識的人員亦可操作。
配備了在USB 閃存中保存控制器數據的功能。

03豐富的擴展性
標配RS232C 和Ethernet板。選配功能可支持CC-Link、DeviceNet,
以及EtherNet/IP 等高速、大容量的各種網絡。
可以簡單地連接其他公司的控制器以及其他公司的VISION 視覺,RCX340堪稱“連接控制器”。

支持多種現場總線/最多可連接4 台機器人進行集中管理
標配RS-232C、Etehrnet 板。還可以支持CC-Link、EtherNet/IP、DeviceNet、Profibus ※1等現場總線,連接、控制各種各樣的設備。5軸以上時,可通過YC-Link/E 最多連接4 台RCX340 控制器,對多台機器人進行集中管理。
※1預計2014 年9 月起提供支持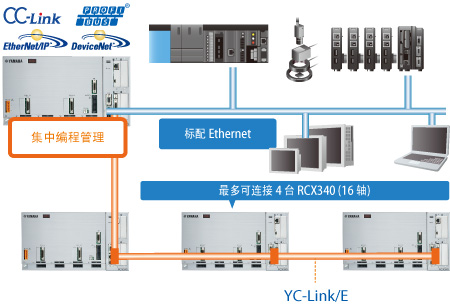
Downloads

